一般的に、三相モーターは、小電力であれば単相入力のインバータを使って安全に運転できます。単相入力のインバータは標準で三相出力を持っており、三相モーターの運転に適しています。また、単相電源の二相をモーターの二相に接続し、第三相をコンデンサで接続する(90度の位相差を作る)ケースもあります。この接続方法は文献でシュタインメッツ接続と呼ばれています。しかし、この方法はモーターの性能を著しく低下させるため、推奨されません。銘板に記載されている定格出力でモーターを運転すると、モーターが損傷する可能性があります。
基本的に、モーターは過負荷と、それに伴う過電流や過熱によって故障・焼損することがほとんどです。この観点から、モーターの過熱保護は、2つの異なる概念に分類できます。
直接保護:
モーターのオプションにもあるPTC、サーモスタット、PT100などの機器を巻線内に直接配置し、巻線の実際の温度(または温度が閾値を超えたこと)を外部に知らせることで、モーターが損傷する前に停止させるものです。これは、モーターに適切なアクセサリーを取り付けるだけでなく、アプリケーション/フィールドエンジニアがモーターの運転シナリオにおいてとるべき予防措置の結果でなければなりません。測定と表示が温度に直接依存しているため、これを直接保護方式と呼ぶことができます。
間接保護:
もう一つ一般的に好まれる方法は、モーター電流を監視し、「過負荷電流が長時間流れた場合、モーターは過熱しているに違いない」という論理に基づいてモーターを保護する方法です。これには、様々な電気開閉装置(サーマルリレー、モーター保護スイッチなど)が利用可能です。
これらは同じ目標を対象としていますが、動作原理の違いから、全く同等であるとは考えられません。
本体やパッケージサイズに関して、IEC規格で定められている同じ出力、同じ極数よりも小さなフレームサイズに収まるモーターのことです。限られたスペースに収める必要がある場合や、コスト、重量を考慮して選ばれることがあります。
サービスファクターとは、損傷する前に連続して供給できる最大出力と、銘板に記載されている出力との比率のことです。サービスファクターは、実用レベルでの過負荷や、通常よりも高い周囲温度など、予期せぬ事態が発生した場合に、損傷することなく運転を継続できる能力の尺度です。
ELK Motorsのサービスファクターは、一般的にIE2効率クラスで1.15~1.20、IE3クラスモーターで1.20~1.25です。
要約すると以下の通りです。
出力: モーターの出力をkWで示します。HP(馬力)で表記されることもあります。これは機械的出力です。
RPM: 定格負荷時のモーターの定格回転速度をrpm(またはRPM)で示します。
供給電圧と周波数: 定格供給電圧 (Volts) と周波数 (Hz) の値です。さらに、三相モーターの場合は、Δ結線(デルタ - D)およびY結線(スター - Y)の場合の電圧値も記載されます。
供給によるモーターの種類: 非同期モーターは、主に単相(single-phase)または三相(three-phase)バージョンとして製造されています。単相電源(つまり相、中性線)から供給されるモーターは単相と呼ばれ、三相電源(つまりR-S-TまたはL1-L2-L3)から供給されるモーターは、名前が示すように三相と呼ばれます。
定格電流: 銘板に記載されている通り、定格負荷で運転中のモーターが通常時に主電源から引き込む電流(A)の値です。この電流値を超える負荷は一般的に過負荷に分類され、この状態で長時間運転するとモーターが損傷する可能性があります。
宣言と認証: 欧州の機械指令に準拠して製造されていることを示すCE宣言、米国およびカナダの国々に準拠していることを示すUL、CSA、ロシアに準拠していることを示すEACなどの認証/スタンプがある場合があります。世界中の様々な地域に対応した多くの宣言/認証があります。
モーターの取り付け構造: 非同期モーターには標準的な取り付けタイプがあります。例: B3: 脚取付、B5/B14: フランジ取付、またはB35: 脚+フランジなどの組み合わせ。
運転定格: 一般的に、ラベルに記載されている出力と性能値は、モーターの連続運転(この場合、S1 - 連続定格)に基づいて記載されています。ただし、S2からS9まで、他の多くの運転定格も定義されています。例えば、S3-%40EDは、モーターが時間のうち40%を定格負荷で運転し、残りの60%は停止することを意味します。この場合、休止時間が許容されるため、S1定格のデータよりも高い出力が可能であることが計算できます。これらの運転定格は、一般的に断続定格に分類されます。
シリアルナンバー: 将来、工場データベースからモーターを照会する際に特に有用な登録情報です。
絶縁クラス: ELK Motorsは標準でFクラス絶縁です。これは、モーター巻線が155℃までの温度上昇に適していることを意味します。オプションでHクラスも製造可能で、これは180℃を意味します。
重量: モーターの正味重量です。この重量には梱包材の重量は含まれません。
効率クラス: ELK Motorとしては、IE2、IE3、IE4の効率クラスのモーターを製造しています。また、IEの概念に当てはまらない特殊な設計/特定の分野向けのモーターも製造しています。
IP保護クラス: ELK Motorでは、標準でIP55保護クラスのモーターです。IPはIngress Protection(侵入保護)の略で、外部からモーター内部への水や埃の侵入に対するモーターの密閉性を定義します。
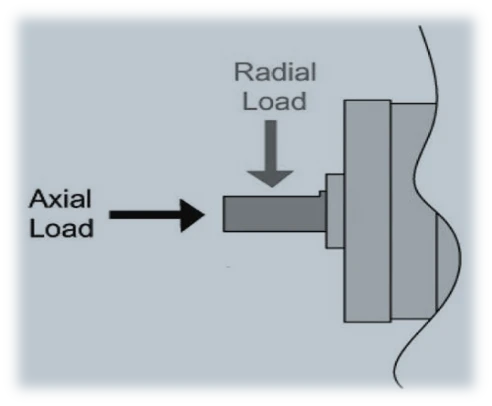
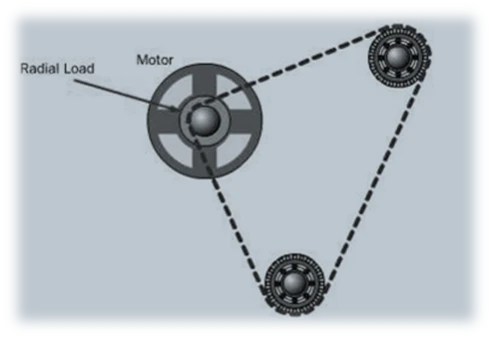
ベアリングタイプ: モーターに使用されているベアリングに関する情報です。アプリケーションエンジニアは、実際の負荷(半径方向と軸方向の両方)がベアリングの制限値を超えないことを確認する必要があります。この場合、オプションで強化されたベアリングを使用することができます。
製造国: 製品が製造された国を示します。ELK Motorsは自社工場以外での委託製造は行っておりません。欧州の規制と設計基準に基づいて、100%自社および国内のR&Dチームで生産しています。ELK Motorは政府公認のR&Dセンターです。
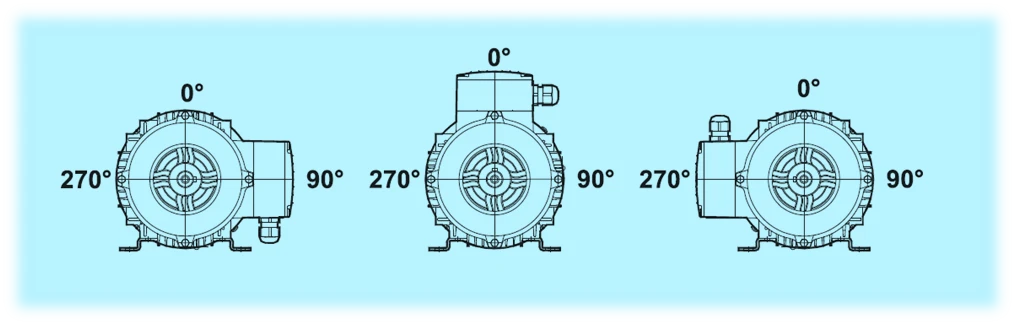
63~180フレームサイズのELK Motorsは、取り外し可能な脚を3つの側面に取付けられるため、様々な取り付けタイプに対応できます。この機能により、端子箱を希望の側面に組み立てることが可能です。標準モーターでは端子箱は上部にあります。200~315フレームサイズのモーターは脚が固定されています。しかし、全範囲で取り外し可能な脚を持つように、追加のR&D研究がすでに進行中です。最新情報については営業にお問い合わせください。
特に指定がない限り、当社のモーターには標準でボールベアリングが使用されています。各ベアリングには、軸方向と半径方向の2つのベアリング力が定義されています。軸方向力は、モーターシャフトを内側に押し込むか、または外側に引っ張ろうとする軸方向の力です。半径方向力は、モーターシャフトを側面から押す力です。一般的に、モーターと負荷の間でベルトプーリーが伝達に使用されるアプリケーションでは、運動を伝達するためのベルトの張力が、標準ベアリングが耐えられる以上の半径方向負荷を生成する場合、モーターのフロントベアリングは、NUタイプとも呼ばれる円筒形および強化ベアリングクラスを要望に応じて選択することができます。これとは別に、特に大型モーターでは、ベアリングの再給油を可能にするグリースニップル付きの構造も提供可能です。
当社のモーターは、以下の3種類のテストが適用されます。
1. 巻線をステータに配置した後(全てのモーター):
a. サージテスト
b. 抵抗測定
c. 絶縁測定
d. 部分放電と高電圧テスト

2. 組み立て中(全てのモーター):
a. 低電圧始動テスト
b. 定格電圧での無負荷テスト
c. 騒音レベル測定
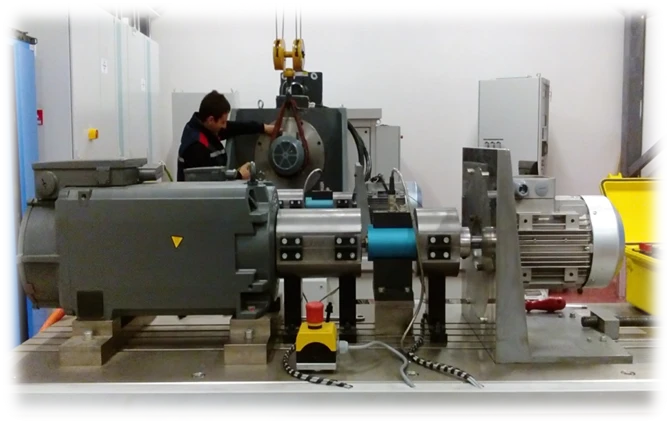
3. ラボでの全負荷下での性能および温度上昇テスト(サンプリング方式)
エンコーダは、モーターの速度を、そして一部の非常に特殊なアプリケーションではその位置を、主制御装置(通常は可変速ドライブ)にフィードバックする装置です。これは、モーターをドライブと一緒に使用し、ゼロ速度まで全トルクを供給する閉ループベクトル制御を必要とするアプリケーションで主に要求されます。
大型で強力なモーターや、ドライブで運転する際、望ましくない電流がベアリング上を循環する「ベアリング電流」が発生し、ベアリングの寿命を縮めることがあります。この現象をなくすための一つの方法が、モーターのベアリングを絶縁ベアリングにすることです。
モーターが運転される場所の大気条件や気象条件により、空気中の湿度が結露によって水に変わる場合、モーター内部、特に巻線に水分が溜まることがあります。特に、可変速ドライブで駆動されるモーターの場合、一般的な市販のドライブの電力出力はPWM高周波で非常に速い立ち上がり電圧波形であるため、この状況はさらに多くの問題を引き起こす可能性があります。結露対策として、ご要望に応じてモーター内部にヒーターを内蔵することができます。これらのヒーターは、モーターが始動する前に作動し、凝縮した水分、特に巻線に溜まった水分を除去します。
IPはIngress Protectionの略で、固体/液体の侵入に対する保護を意味します。IPという略語の後には2つの数字が続きます。このうち、10の位の数字は固体に対する保護を意味し、1の位の数字は液体に対する保護を意味します。ELK Motorsは標準でIP55保護クラスで製造されています。ご要望に応じてIP56、IP65、IP66レベルも可能です。
IP5x: 埃に対する部分的な保護。通常の状態では、埃がモーターに侵入する可能性がありますが、これは運転上の問題を引き起こすとは考えられていません。
IP6x: 完全に密閉され、防塵設計。
IPx4: あらゆる方向からの水しぶき、飛沫水から保護。
IPx5: あらゆる方向からの低圧水流から保護。例えば、蛇口から流れる水。
IPx6: あらゆる方向からの高圧水流から保護。
#BBD0E0 »
- 動作電圧と周波数(1相、3相 / 220V、380V、400V、440V、460V / 50 Hz、60 Hz)
- モーターの速度
- 取り付け構造: 脚付きB3、フランジB5、脚付きフランジB3 B5など
- 軸方向負荷の大きさ
- 半径方向負荷の大きさ
- 運転される環境の温度
- 運転される環境の標高
- 保護タイプ: IP54、IP55など
- 1時間あたりの起動回数: Start/h
- 運転定格(運転モード): S1、S3、S5など
- サービスファクター: 1.0、1.10、1.15 - 1.20 - 1.25など
- 運転される環境の湿度: ヒーターとドレンが必要か
- システム安全のためにサーミスタPTCサーミスタが必要か否か
長寿命で低コスト、競争力があり、顧客の期待に応える機械を生産するための最も重要な条件は、電動機を正しく選定することです。適切な電動機を選ぶ上で最も重要な要素は、仕事の特性と、機械が動作する環境の特性です。全ての顧客や類似のアプリケーションに同じタイプのモーターを提供することは、常に正しい結果をもたらすわけではありません。システムが最適な形で何を必要としているかを突き止めることが重要です。この意味で、アフターサービスと技術サポートは非常に重要です。
周囲温度、環境の湿度、環境に引火性および爆発性のガスが存在するかどうかは、機械が埃、水、熱帯条件にさらされるかどうかを決定する最も重要なパラメータです。
機械が1日に何時間稼働するか、断続的か連続的な運転状態か、動作の感度、エネルギー源の特性、システムに期待される効率、コマンドに対するシステムの応答時間といった特性は、仕事の特性を決定するパラメータです。これらの特性に応じて、電動機の絶縁クラス、保護クラス、種類、出力、速度を決定する必要があります。さもなければ、システムは非常に高価で非効率になるか、短期間で故障し、顧客の不満を引き起こすでしょう。
ベアリングは、2つの内外輪と、その間を転がるボールやローラーなどの部品で構成されており、可能な限り摩擦を少なくして回転運動を可能にする、モーターの最も重要な要素の一つです。ベアリングの構造には、内輪、外輪、転動体、保持器が含まれます。ベアリングは非常に強い機械的効果に耐えるように製造されています。
モーター内の機械的な動きは、最小限の摩擦で伝達されなければなりません。摩擦が増加すると、モーターの効率に直接影響します。
ベアリングが損傷し、モーターが悪影響を受けるケースがいくつかあります。ベアリングで発生する故障は、モーターの効率を低下させます。モーターの動作に直接影響を与える要素であるベアリングに故障があるかどうかを正しく診断する必要があります。
すべてのベアリングには寿命があります。しかし、ある研究によると、電動機のベアリングのうち、その寿命を全うしたのはわずか34%であることが明らかになっています。残りのベアリングは、寿命を全うする前に故障により交換を余儀なくされています。ベアリングは、長寿命で耐久性があり、高出力に耐えるように製造されています。しかし、メンテナンス不足、予防策の不足、誤った使用または誤った取り付けにより、ベアリングに故障が発生することがあります。
ベアリングは様々な理由で機械的に疲労します。その症状は、ベアリング表面から粒子が剥離する形で見られることがあります。ベアリング内の転動体が負荷のかかる表面に接触すると、せん断応力が発生します。これらの応力は、表面の特定の場所に亀裂を発生させます。ボールなどの転動体が回転運動中にこれらの亀裂上を通過すると、粒子が剥離します。ここで重要なのは、ベアリングが耐えられる回転数と、ベアリングが動作する運転時間です。ベアリングの疲労兆候は、周囲の条件、負荷、およびベアリングを構成する部品の機械的強度に依存します。
適切な出力と構造を持つ電動機の寿命は、およそ15年と見積もることができます。通常の状態では、モーターがこの期間スムーズに稼働することが望まれます。しかし、外部要因や、適切な保護対策を講じなかったり、モーター自体の問題により、モーターが焼損することがあります。最初に思いつくのは、モーターを巻き直すことです。しかし、モーターを巻き直すたびに、その寿命は以前よりも短くなり、消費電流が高くなる可能性があります。
モーターの巻き直しは、モーターの効率低下を引き起こす可能性が非常に高く、また手動による巻き直し作業のコスト、材料費、時間的損失を考慮すると、一般的な目安として、フレームサイズ100以下のモーターは修理するよりも交換することをお勧めします。
さらに、
• 焼損した巻線を取り外す際、シートの温度を200°C以上に上げないことをお勧めします。そうしないと、シートが電気的特性を失い、幾何学的に形状が変化します。
IEC 60034-1規格の13.5EM(電磁両立性(EMC)に関して):
かご形誘導電動機は測定の必要はありません。
標準を含むモーターに適したテストは意図されていません。
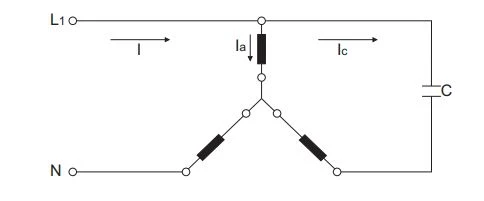
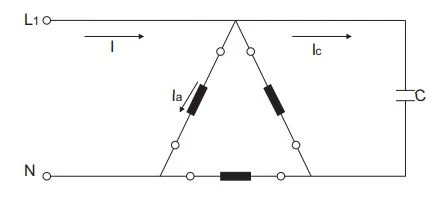
三相Δ結線/Y結線の誘導電動機を単相システムで運転する必要がある場合、両方の結線でコンデンサを相群巻線と並列に接続します。コンデンサは、単相回路での発展と運転を可能にします。モーター巻線を通過する電流(Ia)とコンデンサを通過する電流(Ic)の間に位相差があるため、トルクが生成されます。言い換えれば、単相とコンデンサの助けを借りて、固定子巻線を通過する電流間の位相差により、回転磁界が生成されます。この方法では、三相誘導電動機が単相システムで運転されると、モーター出力は三相供給と比較して40〜45%減少します。始動トルクを増加させるために、始動時に2つ目のコンデンサが使用されます。短時間回路内に留まる電解コンデンサが好まれます。
- 単相回路でコンデンサを備えた三相誘導電動機の接続図
単相システムでコンデンサを使用してスター結線された誘導電動機の運転
単相システムでコンデンサを使用してデルタ結線された誘導電動機の運転。
直接お問い合わせください。できるだけ早くご要望にお答えします。
主な見出しで簡単にまとめると以下の通りです。
- 独自のデザインと生産。100%自社のエンジニアリングとデザインを使用。
- 革新的なデザイン。創業以来、世界のより広く知られている企業よりも前に、IE3モーターに対応したモーターを設計。
- 柔軟な使用を可能にするデザイン: 脚が取り外し可能で、端子箱を90度回転させることができ、フロントが完成しているため事前に交換可能、脚は鋼板製でより耐久性がある。
- コンパクトモーターでIE2、さらにはIE3の効率レベルを達成。
- 高いサービスファクター。つまり、実際の現場で発生する可能性のある予期せぬ悪条件(周囲温度の上昇、負荷の増加、運転定格の困難さなど)に対して、より高い耐性と耐久性を持っている。
- 高い始動トルク
- 高い効率値。ELK Motorsは、規格が最低効率値として強制し、分類に十分とされている値よりも高い効率値を持っている。
非同期モーター(誘導モーター)は、固定子巻線に印加された交流を、回転子で機械的エネルギーに変換する機械です。これらのモーターは、誘導の原理に基づいて動作するため、誘導モーターとも呼ばれます。この観点から、これらは産業全体で製造に、また機械で電気エネルギーを運動に変換するために最も広く使用されている機器です。
非同期モーター(誘導モーター)と同期モーターを区別する最も重要な特徴は、モーター内に形成される電界の速度(同期速度)が、供給周波数とモーターの極数に関して明確で一定の数であるのに対し、非同期モーター(誘導モーター)のシャフトの実際の回転速度は、この同期速度よりも遅く、回転数は負荷に依存することです。つまり、回転数は一定ではなく、負荷に応じて、モーターの出力と設計によって約2%まで変化します。この差は、文献では「滑り」と呼ばれています。
- 継続的な手入れが不要です。適切な環境で動作する非同期モーター(誘導モーター)は、約10年後にベアリングの交換が必要になります。
- スペアパーツが容易に入手できます。
- 同じ出力の他のタイプのモーターよりも安価です。
- 他のモータータイプよりも頑丈です。
- 運転中にアーク(火花)を発生させません。
- 負荷が変化しても回転数はあまり変わりません。
- 電子回路(周波数変換器)の助けを借りて、回転数を簡単に調整できます。
- 小出力から非常に大出力まで製造されます。
- 単相および三相として製造可能です。
- 同期機のように、第二の供給源(DCモーターのように)は必要ありません。
- 将来的に減磁しやすい磁石が内部にありません。
上記の理由により、非同期電動機は実用上最も使用されている電動機です。非同期電動機は、IP54、IP55、IP56、IP66などの保護クラス、およびB3、B5、B14、B34、B35などの構造形式で製造され、あらゆるタイプの組み立てで動作するという利点があります。
- 始動時に定格電流の4~8倍の電流を消費します。
- 回転数の変更は、供給周波数を変更することによってのみ可能です。
非同期モーター(誘導モーター)が広く使用されている理由の一つは、交流を容易に取得および伝送できることです。産業で使用されるモーターの90%は非同期モーター(誘導モーター)であり、これは非同期モーター(誘導モーター)の構造に多くの機械部品がないことによる故障のリスクが低いこと、およびその単純な構造によるメンテナンスの容易さによるものです。低電圧三相非同期電動機は、0.12 kWから3500 kWまで製造でき、市場で広く入手可能です。製粉機、ポンプ、コンプレッサー、ファン、コンベア、プレス、マシニングセンター、油圧ユニットなどで非常に広く使用されています。
50 Hz電源用に製造された標準のELKモーターは、60 Hzネットワークで使用できます。以下の比率は、与えられた定格値の変化を示しています。
| 50 Hz 定格電圧 | 60 Hz 定格電圧 | 定格 速度 | 定格 出力 | 定格 トルク | 定格 電流 | 始動 トルク | 破壊 トルク | 始動 電流 |
| 230V | 220V | 1.193 | 1 | 0.84 | 0.97 | 0.77 | 0.8 | 0.8 |
| 400V | 380V | 1.193 | 1 | 0.84 | 0.97 | 0.77 | 0.8 | 0.8 |
| 400V | 440V | 1.20 | 1.16 | 0.97 | 0.98 | 0.87 | 0.9 | 0.9 |
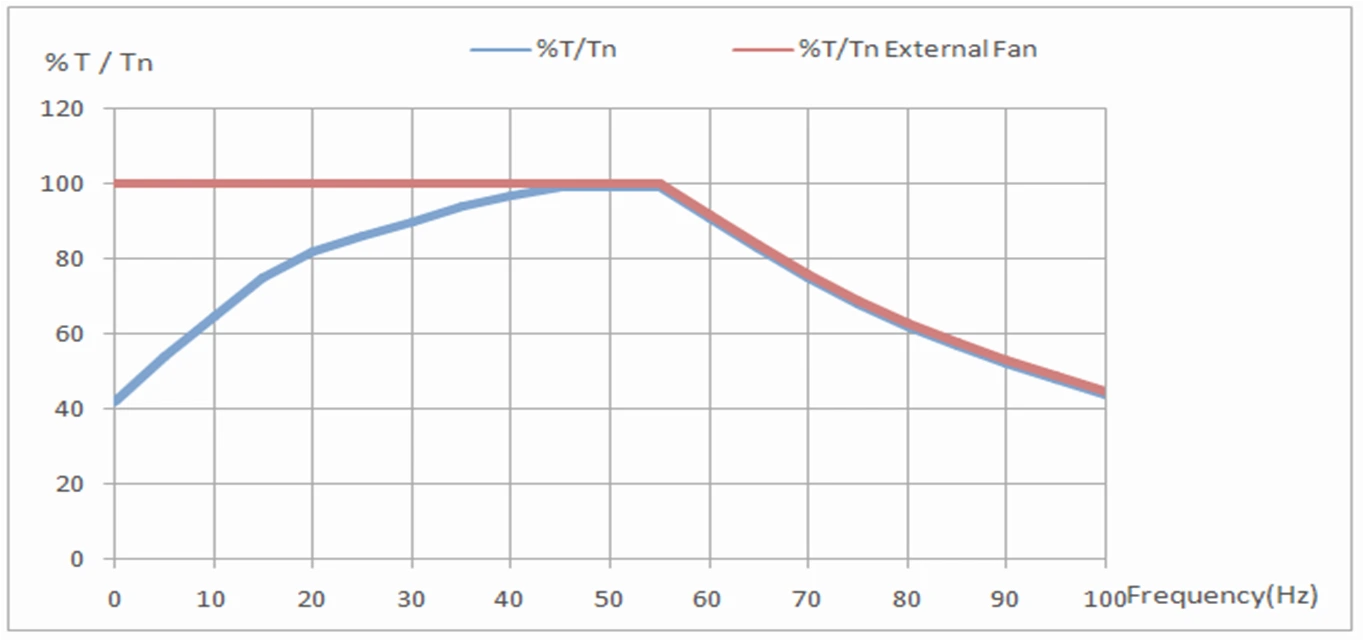
ドライバーアプリケーションでは、サービスファクター、F/BまたはH/Bマージン絶縁/加熱クラス、およびオプション機能(例:サーミスタ、強制ファン、エンコーダ、絶縁ベアリング、さらには異なる電圧/周波数に合わせて巻かれた特殊巻線モーターなど)を提供することで、スムーズな動作が保証されます。